[算法笔记]粒子群优化(PSO)
算法背景
该算法最初是受到飞鸟集群活动的规律性启发,进而利用群体智能建立的一个简化模型。粒子群算法在对动物集群活动行为观察基础上,利用群体中的个体对信息的共享使整 个群体的运动在问题求解空间中产生从无序到有序的演化过程,从而获得最优解。
基础知识
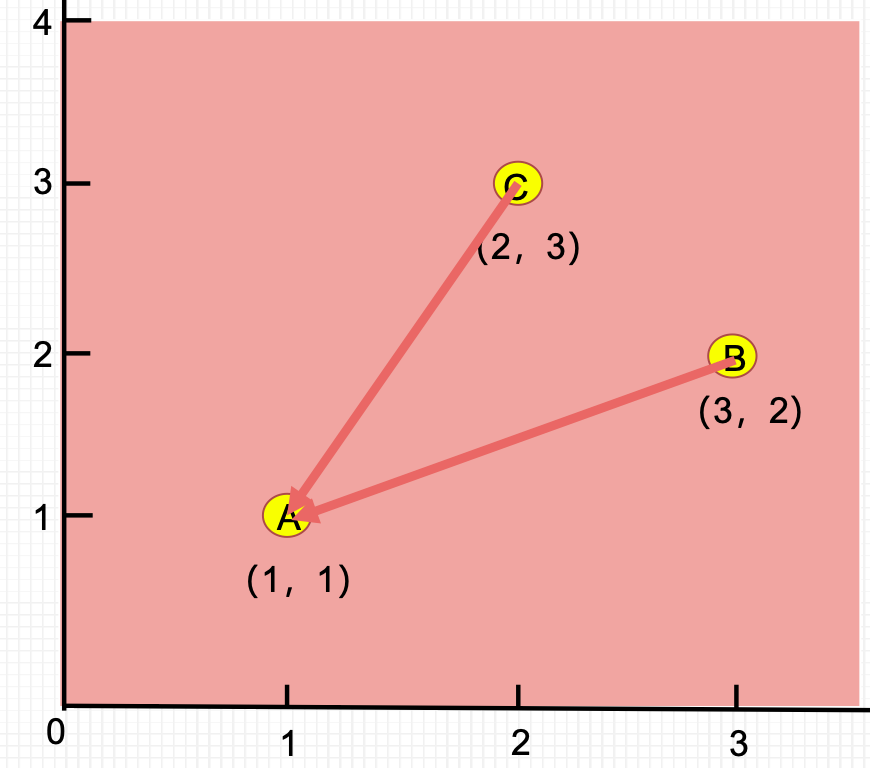
问:已知A为全局最优,B和C如何移动才能到达A处?这个过程如何用数学表达式描述?
- 某个粒子(点)的移动,是有大小,有方向的。有大小,有方向的东西叫向量。位置就是坐标。
- 数学的方法:$(1,1)=(2,3)+\alpha \to \alpha = (1,1)-(2,3)=(-1,-2).$
- 如果A点不一定是个全局最优点,C点在移动到A点的过程中,想要继续探索,可以给其移动的向量加上一个随机值:$(x,y)=(2,3)+rand * (-1,-2).$
算法原理
假设在一个D维的目标搜索空间中,有N个粒子组成一个群落,其中第i个粒子表示为一个D维的向量:
第i个粒子的“飞行”速度也是一个D维的向量,记为:
在第t代的第i个粒子向第t+1代进化时,根据如下式子更新:
下一时刻的速度=当前的惯性+个体极值的方向+全局最值的方向
$v_{i j}(t)$代表t时刻粒子的方向,$p_{i j}(t)$代表粒子个体极值的方向, $p_{g j}(t)$代表全局最值。$w,c_1,c_2$代表权重,$r_{1}(t),r_{2}(t)$为随机值。$x_{i j}(t+1)$表示t+1时粒子的位置。
- eg.
- 假设某粒子当前位置C,个体极值位置B,全局 最优位置A,那么该粒子下一步的运动状态如图所示。
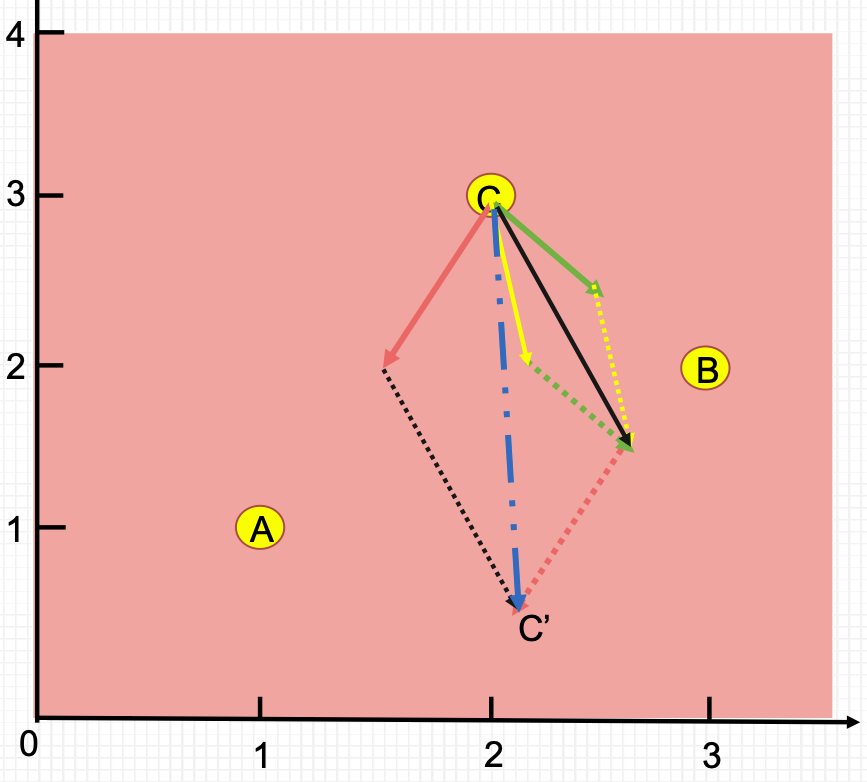
$v_{i j}(t+1)=w v_{i j}(t)+c_{1} r_{1}(t)\left[p_{i j}(t)-x_{i j}(t)\right]+c_{2} r_{2}(t)\left[p_{g j}(t)-x_{i j}(t)\right].$
B对应$p_i$,A对应$p_g$,黄色向量为当前速度方向,绿色向量为向个体极值飞行步长,红色为向全局最值飞行步长。
算法流程
- 输入:参数$\omega:0.5-0.8,c_1,c_2:0.1-2,v_{max},xß_{max}:$取决于优化函数。
- step1:初始化种群$x$;
- step2:计算个体适应度*;
- step3:更新粒子速度−>更新粒子位置*;
- step4:并计算新位置的适应度,若新位置适应度更高,则将该粒子的位置进行更新,否则不更新。
- step5:判断是否满足终止条件* ,是则退出,否则返回Step2。
- 输出:输出最优值。
- 注:
- *1.一般的,我们优化目标是最小化一个函数值。所以个体计算出的函数值越小,适应度越高。
- max𝑓 = min−𝑓
- *2.注意更新速度后,先进行速度边界检测,一般采用$v(v>v_{max}) = v_{max}$ ,位置同理。
- *3.常见终止条件为设定迭代进化次数、适应度n代不再变化等。
算法分析
- 优点:原理比较简单,实现容易,参数少。
- 缺点:易早熟收敛至局部最优、迭代后期收敛速度慢的。
分析:标准粒子群算法的参数是固定的。𝜔描述的是粒子的“惯性”,在进化前期𝜔应该大一些,保证各个粒子独立飞行充分搜索空间,后期应该小一点,多向其他粒子学习。$c_1,c_2$分别向个体极值和全局 极值最大飞行步长。前期$c_1$应该大一些,后期$c_2$应该大一些,这样就能平衡粒子的全局搜索能力和局部搜 索能力。3个参数共同影响了粒子的飞行方向,导致即使其他粒子找到更好的,但是当前粒子惯性太大,不能很快的飞向更优的位置。
算法拓展
针对标准PSO的缺点,通常有如下的改进:
- 1.实现参数的自适应变化。
- 2.引入一些其他机制,比如随机的因素,速度、位置的边界变化−后期压缩最大速度等。
- 3.结合其他智能优化算法:遗传算法、免疫算法、模拟退火算法等等,帮助粒子跳出局部最优,改善 收敛速度。