[文献阅读] Deep Reinforcement Learning for Task Offloading in Mobile Edge Computing Systems 移动边缘计算系统中任务卸载的深度强化学习
摘要与论文贡献
- CCF:A类
- 考虑了缘节点的未知负载水平动态,提出了一种基于drl的MEC系统分布式卸载算法。在该算法中,每个移动设备可以利用局部观察到的信息,包括其任务的大小、其队列的信息和边缘节点的历史负载水平,以分散的方式确定卸载决策。此外,该算法能够处理时变的系统环境,包括新任务的到来、每个任务的计算需求以及其他移动设备的卸载决策。
参数
| 参数 | 描述 |
|---|---|
| m | 移动设备 |
| n | 边缘计算节点 |
| $k_m(t)$ | t时隙到达m的任务,若无新任务到达$k_m(t)=0$ |
| $\lambda_m(t)$ | t时隙开始时队头任务的大小,若无新任务到达$k\lambda_m(t)=0$ |
| $\rho_m$ | $k_m(t)$需要的处理频率 |
| $l_m^{comp}(t)$ | 在计算队列上$k_m(t)$被处理完成或被丢弃的时间 |
| $\delta_m^{comp}(t)$ | 在计算队列上$k_m(t)$等待被处理完成或被丢弃的时间 |
| $l_m^{tran}(t)$ | 在传输队列上$k_m(t)$被处理完成或被丢弃的时间 |
| $\delta_m^{tran}(t)$ | 在传输队列上$k_m(t)$等待被处理完成或被丢弃的时间 |
| $k_{m,n}^{edege}(t)$ | 在边缘设备n上对应的m队列中的任务 |
| $\lambda_{m,n}^{edege}(t)$ | $k_{m,n}^{edege}(t)$的任务大小 |
| $f_n^{edege}$ | 边缘设备n的处理能力 |
| $q_{m,n}^{edege}(t)$ | t时隙n中设备m任务的队列长度 |
| $B_n(t)$ | n中的活动队列集 |
| $e_{m,n}^{edge}(t)$ | t时隙结束时被遗弃的任务数 |
| $l_{m,n}^{edge}(t)$ | $k_m(t)$将要被处理时的时隙 |
| $\hat{l}_{m,n}^{edge}(t)$ | $k_m(t)$开始被处理时的时隙 |
系统模型
假设有一组时隙序列 $\mathcal{T}={1,2,…,T}$,每个时隙持续$\Delta$秒。
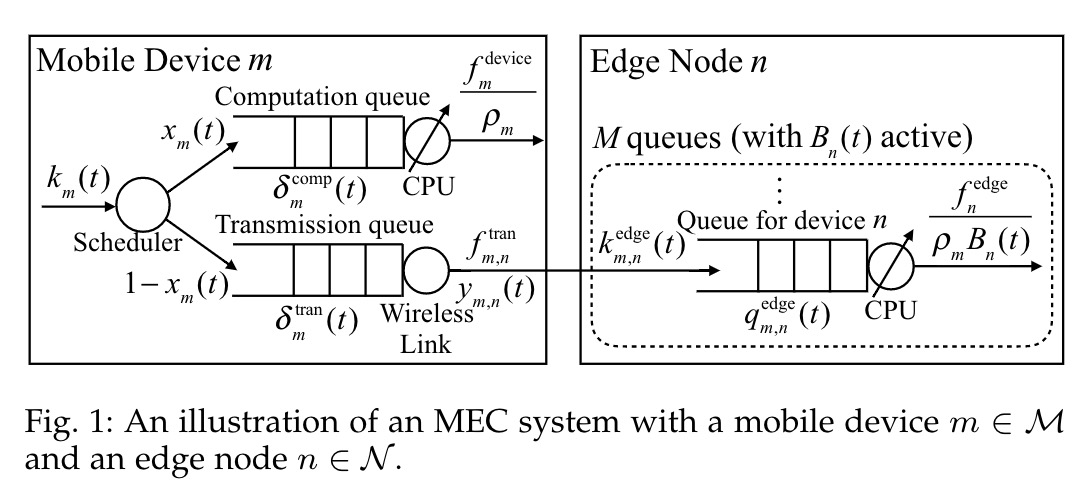
移动设备m模型
- 对于每个$\Delta$,我们假设移动设备要么有新任务到达,要么么有新任务到达, 且每个$\Delta$都很小(e.g. $\Delta = 0.1 $秒)。
- 任务可以被放到计算队列(在本地处理)或者传输队列(在边缘节点上处理)。
- 对于队列中的任务,我们假设任务处理(传输)在一个$\Delta$内完成,而下一个任务将在下一个$\Delta$开始。
任务模型
- $t \in \mathcal{T}$,当m有一个新的任务到达时,定义 $k_m(t)$ 为该任务的索引,如果没有任务到达,$k_m(t)=0$,$ \lambda_m(t)$表示在时隙t开始时队列开头新到达的bit数,如果在t开始时有一个新的任务$k_m$(t)到达,那么$\lambda_m(t)$的大小就是$k_m(t)$的大小,否则$\lambda_m(t)$=0。
- 将$k_m(t)$设为离散的,有$\Lambda \equiv {\lambda_1,\lambda_2,…,\lambda_{|\Lambda|}} , \lambda_m(t) \in \Lambda \cup {0}$。
- $k_m(t)$需要 $\rho_m$ 的处理频率。
- $k_m(t)$有一个截止时间$\mathcal{T}_m$,如果$k_m(t)$在$t+\mathcal{T}_m-1$结束时没有被处理完就被丢弃。
任务卸载设计
- 每当有一个新任务到达时,(a)在本地计算还是卸载。(b)卸载哪个边缘服务器上。 $x_m(t)$ 表示卸载地点。1:在本地计算,0:卸载到边缘服务器上。
- 在t开始时,$\lambda(t)x_m(t)$ 表示在移动设备本地计算队列的bits。$\lambda(t)(1-x_m(t))$ 是移动设备m到达传输队列的bits。
- 二元变量 $y_{m,n}(t) \in {0,1}$ 表示$k_m(t)$是否卸载,1:卸载,0:不卸载。为方便表示,引入向量$\textbf{y}_m = {y_{m,n}(t),n \in \mathcal{N}}$,假设每个任务只能被卸载到一个边缘服务器:
其中指示器$\mathbb{1}(z \in \mathcal{Z}) = 1$ 如果$(z \in \mathcal{Z})$,否则等于0。
计算队列
$f_m^{device}$ 表示每个时隙内的处理能力,设备m最大可以处理队列中 $\frac{f_m^{device}}{\rho_m}$ bits的数据。
- 如果t开始时,$k_m(t)$在队列内, $l_m^{comp}(t) \in \mathcal{T}$ 表示$k_m(t)$被处理或者被丢弃的时隙。如果$k_m(t)$不放入计算队列或$k_m(t)=0$则$l_m^{comp}(t) \in \mathcal{T} = 0$。
$\delta_m^{comp}(t)$ 表示$k_m(t)$放置在队列中等待处理的时隙数,移动设备将在决定放置哪个队列前计算$\delta_m^{comp}(t)$。给定$l_m^{comp}(t^{‘}), t^{‘} < t$,有
其中$[z]^+ = \max \left \{ 0,z \right \} $,在t之前的所有任务要么都被处理,要么被丢弃。因此$\delta_m^{comp}(t)$确定任务$k_m(t)$应等待处理的时隙数。
- $k_m(1)$被放在计算队列中,它的处理在时隙5内完成,那么$l_m^{comp}(1) = 5$。
- 同时,$k_m(2)=0$,那么$l_m^{comp}(2) = 0$。
- 在时隙3开始时,如果$k_m(3)$被放入计算队列中,那么将在时隙$l_m^{comp}(1) = 5$后处理它,因此他必须等待$\delta_m^{comp}(3) = [max \left \{ 5,0 \right \} - 3 + 1]^+ = 3$个时隙。
- 如果m在t开始时处理$k_m(t)$,那么将在时隙$l_m^{comp}(t)$结束时完成处理或丢弃。
前半段为当前时隙+等待时隙+需要处理的时间-1,表示任务被处理。后半段表示任务被丢弃。$k_m(t)$将在$\delta_m^{comp}(t)$个时隙才开始处理。
传输队列
- $f_m^{tran}$ 表示每个时隙从m到n的传输容量。
- 在t开始时,$k_m(t)$被放在传输队列,同样$l_m^{tran}(t)$表示$k_m(t)$被传输或被丢弃的时隙。如果$k_m(t)$没有被放在传输队列中,$l_m^{tran}(t)=0$。
- 同样
前半段为当前时隙+等待时间+传输时间,后半段为丢弃时间。
在边缘节点上
- 每个n包含M个队列,每个队列对应一个传输设备。
- 在一个时隙中的边缘节点接收到卸载任务后,该任务将在下一时隙开始时被放在相应的队列中。
- 如果m的任务在t开始时被放在相应的队列中,记为 $k_{m,n}^{edege}(t)$。
- 如果任务$k_m(t^{‘})$在t-1时隙放到n中,那么$k_{m,n}^{edege}(t)=k_m(t^{‘})$。
- 如果t开始时,没有任务在队列中,则$k_{m,n}^{edege}(t)=0$,$\lambda_{m,n}^{edege}(t) \in \Lambda \cup {0}$表示大小。
边缘节点上的队列
$q_{m,n}^{edege}(t)$ 表示t时隙n中m设备任务的队列长度。
- 如果m队列被称为活动队列,则满足:
- 在时隙t开始新任务到达,即$\lambda_{m,n}^{edege}(t) > 0$。
- 在t-1时隙结束时队列不为0,$q_{m,n}^{edege}(t-1) > 0$,即队列中存在任务。
- $\mathcal{B}_n(t)$ 表示n中的活动队列集。
- $\mathcal{B}_{n}(t)=\left\{m \mid m \in \mathcal{M}, \lambda_{m, n}^{\text {edge }}(t)>0 \text { or } q_{m, n}^{\text {edge }}(t-1)>0\right\}$.
- $B_n(t)$ 表示活动队列数量,$B_n(t) = \mathcal{B}_n(t)$。
- 在时隙t内,n中的活动队列共享n的处理能力,因此n最大可以处理的任务数为:$\frac{f_n^{edege}}{\rho_nB_n(t)}$。
- 假设一个任务在一个时隙内处理完成,那么下一个任务将在下一个时隙才开始处理。
- 设 $e_{m,n}^{edge}(t)$ 为在t时隙被丢弃的任务数,则队列长度为:
先前队列长度+新到达的任务数-应处理的数据-被丢弃的任务大小。
任务的处理或丢弃
同理,$l_{m,n}^{edge}(t)$表示任务处理或丢弃的时间,如果$k_{m,n}^{edge}(t) = 0$,那么$l_{m,n}^{edge}(t) = 0$。由于不确定将会被放在哪个边缘设备上,移动设备不知道$l_{m,n}^{edge}(t)$的值,知道关联任务$k_{m,n}^{edge}(t)$被处理,所以我们定义$\hat{l}_{m,n}^{edge}(t)$表示$k_{m,n}^{edge}(t)$开始处理的时隙。
约束:
第一个约束代表从$\hat{l}_{m,n}^{edge}(t)$到$l_{m,n}^{edge}(t)$的处理能力不小于${k}_{m,n}^{edge}(t)$的大小。第二个约束代表从$\hat{l}_{m,n}^{edge}(t)$到$l_{m,n}^{edge}(t)-1$的处理能力不大于${k}_{m,n}^{edge}(t)$的大小。个人推测:得有足够的能力开始处理${k}_{m,n}^{edge}(t)$?
MEC上的任务卸载问题
State
- 对于移动设备m,有 $s_m(t) = (\lambda_m(t), \delta_m^{comp}(t),\delta_m^{tran}(t),q_m^{edge}(t-1),H(t))$ 。
- 向量$q_m^{edge}(t-1) = (q_{m,n}^{edge}(t-1),n \in \mathcal{N})$。
- 矩阵$H(t)$包含了前一个T步骤(从时隙$t-T^{step}$到时隙$t-1$)时隙中每个n的负载水平。(活动队列的数量)。$H(t)$的大小为为$T^{step} \cdot N$,${H(t)}_{i,j}$表示矩阵i,j的值。对应从时隙 $t-T^{step}$ 开始的第i个时隙总边缘节点j的活动队列数量 。例如在时隙$t-T^{step}+i-1$中,${H(t)}_{i,j} = B_j(t-T^{step}+i-1)$。
- $\mathcal{S}$ 为状态空间,则$\mathcal{S} = \Lambda \cdot \{0,1,…,T\}^2 \cdot \mathcal{Q}^N \cdot \{0,1,…,M\}^{T^{step} \cdot N}$。
- 设备m在时隙开始时获得$\lambda_m(t), \delta_m^{comp}(t),\delta_m^{tran}(t)$。
Action
当$k_m(t)$到达时:(a)是否卸载,(b)卸载到哪里。
- 动作由一个向量表示: $a_m(t)=(x_m(t),y_m(t))$
Cost
- 用 $d_m(x_m(t),a_m(t))$ 来表示任务$k_m(t)$的延迟,给定观察状态$s_m(t)$和动作$a_m(t)$,有$d_m(x_m(t),a_m(t)) = l_m^{comp}(t) - t + 1$。
- 如果$x_m(t)=0$,即卸载到边缘节点,有:
具体的说$k_m(t)$的延迟就是等待处理或丢弃的时隙数。
- Cost:$C_m(x_m(t),a_m(t)) = d_m(x_m(t),a_m(t))$,如果被任务被丢弃,则$C_m(x_m(t),a_m(t))= C$,C为一个惩罚常数,C>0。如果$k_m(t) = 0$,那么$C_m(x_m(t),a_m(t))= 0$。
后使用$C_m(t)$简化表达。
问题表述
- $π_m:\mathcal{S} \to \mathcal{A}$。
- 目标:找到一个最优策略$π_m^{\ast}$,使得cost最小。
基于DRL的卸载算法
使用q值。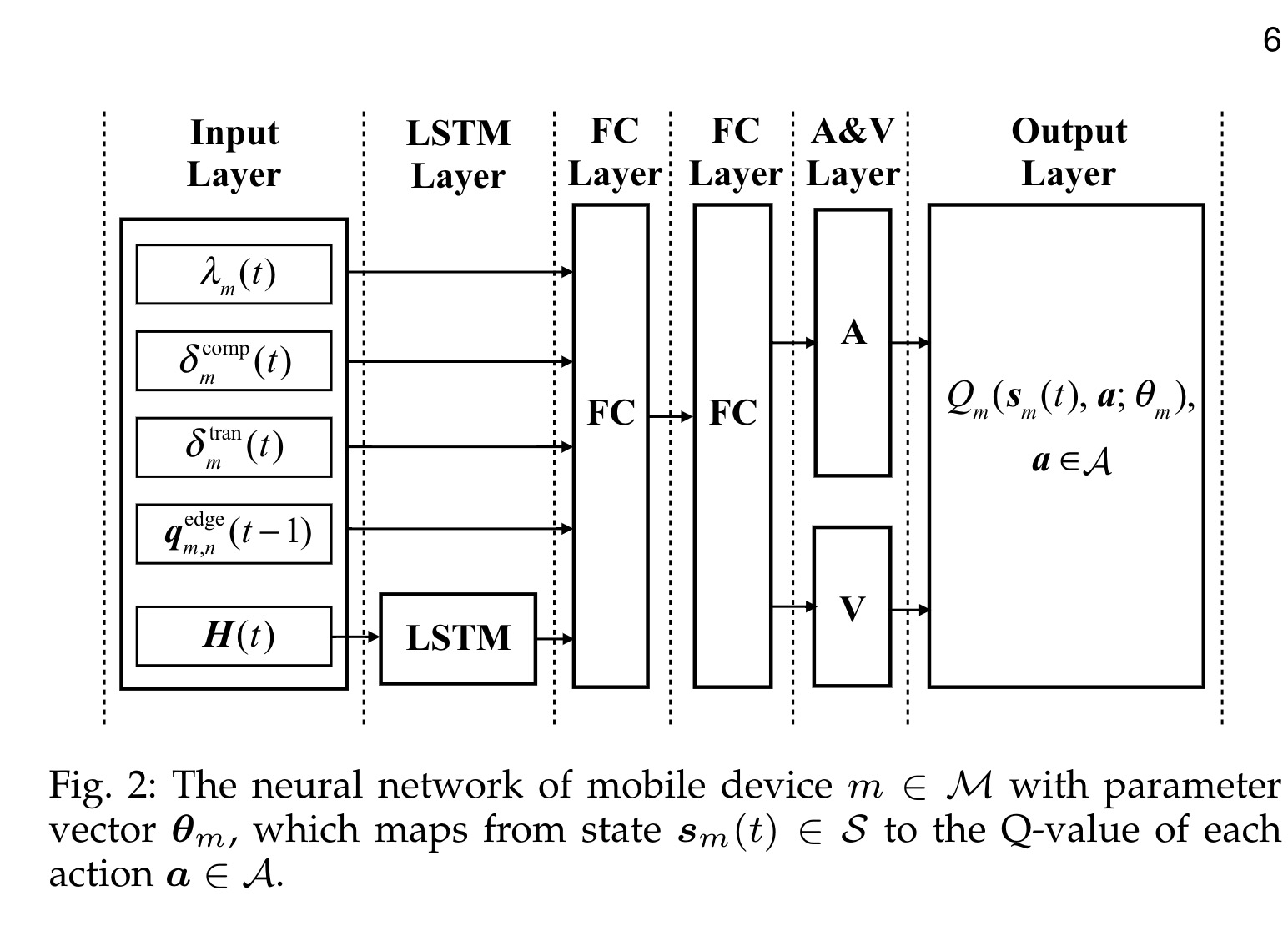
神经网络结构
如图所示,由一个输入层,一个LSTM层,两个全连接层一个优势和价值层(A&V)以及一个输出层组成。
输入层
输入层输入一组向量$(\lambda_m(t),\delta_m^{comp}(t),\delta_m^{tran},q_{m,n}^{edge}(t-1),H(t))$ , 其中$H(t)$被送入LSTM层,其他直接进入到全连接层。
LSTM层
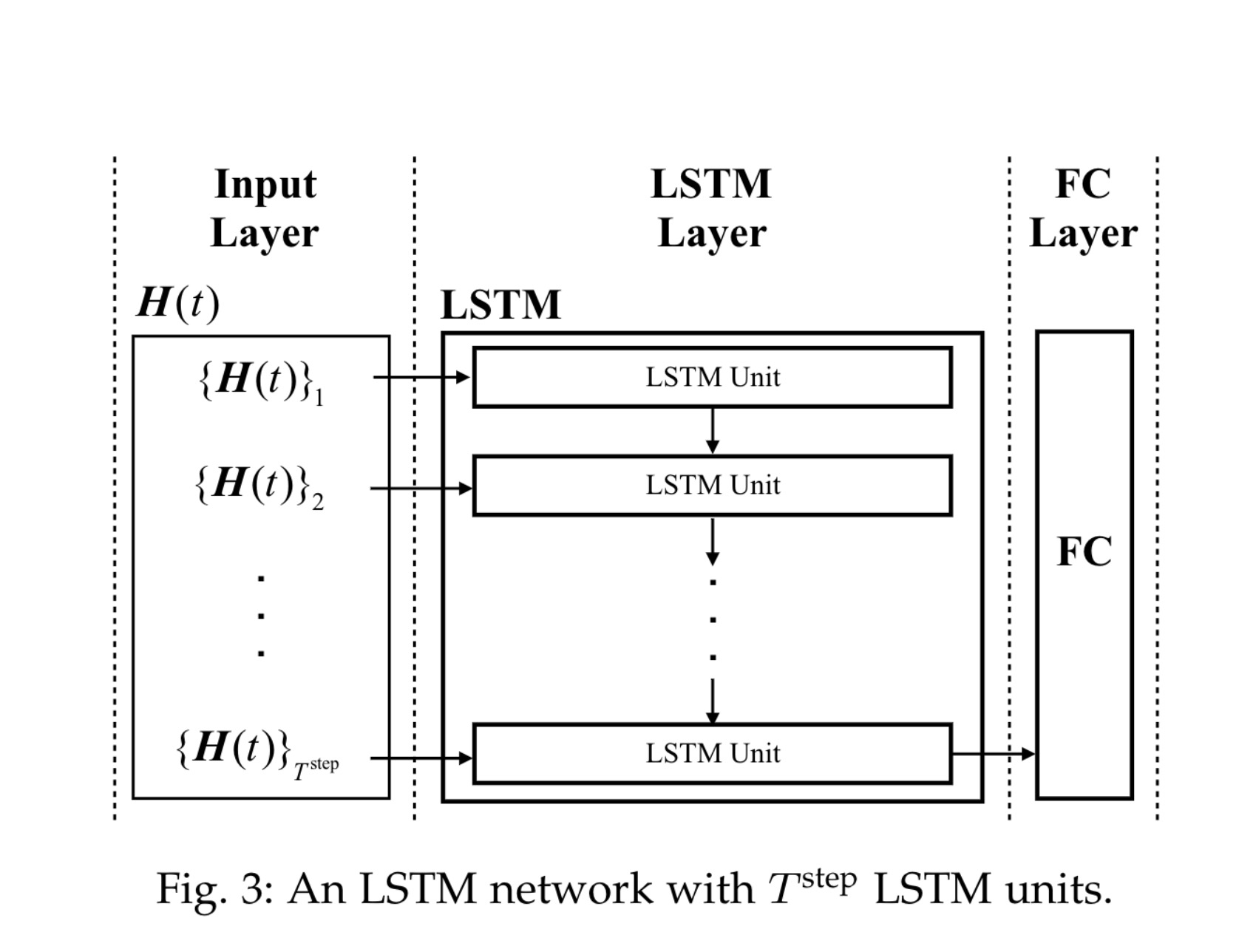
该层负责学习边缘节点上的动态负载水平,使用历史记录来估计未来的负载水平,结构如图3所示。每个LSTM unit都以一行$\{H(t)\}_i$作为输入,这些LSTM unit按顺序连接,以跟踪他们的序列变化,可以得到边缘节点负载水平的变化。LSTM网络将输出最后一个LSTM unit到下一层的神经元。
全连接层
使用ReLU函数作为激活函数。
A&V层和输出层
这一层采用Double-DQN的技术,使用$A_m(s_m(t),a;\theta_m)$表动作优势函数,$V_m(s_m(t);\theta_m))$为状态价值函数。$\theta_m$在DRL的过程中更新。其Q值表示为:
Q值:当前状态价值+(当前动作价值-平均动作价值)
基于DRL的算法
- 算法部分分为在移动设备上的算法和在边缘设备上的算法。
- $n_m \in \mathcal{N}$ 表帮助移动设备m训练的边缘节点n。这个边缘节点n可以是移动设备m具有最大传输容量的边缘节点。用 $\mathcal{M}_n \subset \mathcal{M}$ 表示由边缘节点n训练的移动设备集。
- 在这个算法中,边缘节点n包含了replay memory($D_m$)用于存储在时隙t内移动设备m的多条Transition$(s_m(t),a_m(t),c_m(t),s_m(t+1))$以及两个神经网络: Eval_net 和 Target_Net 以及对应的Q值 $Q_m^{Eval}(s_m(t),a;\theta_m^{Eval})$ 和 $Q_m^{Target}(s_m(t),a;\theta_m^{Target})$ 。其中两个Q值只有$\theta$值不同。
在移动设备m上的算法
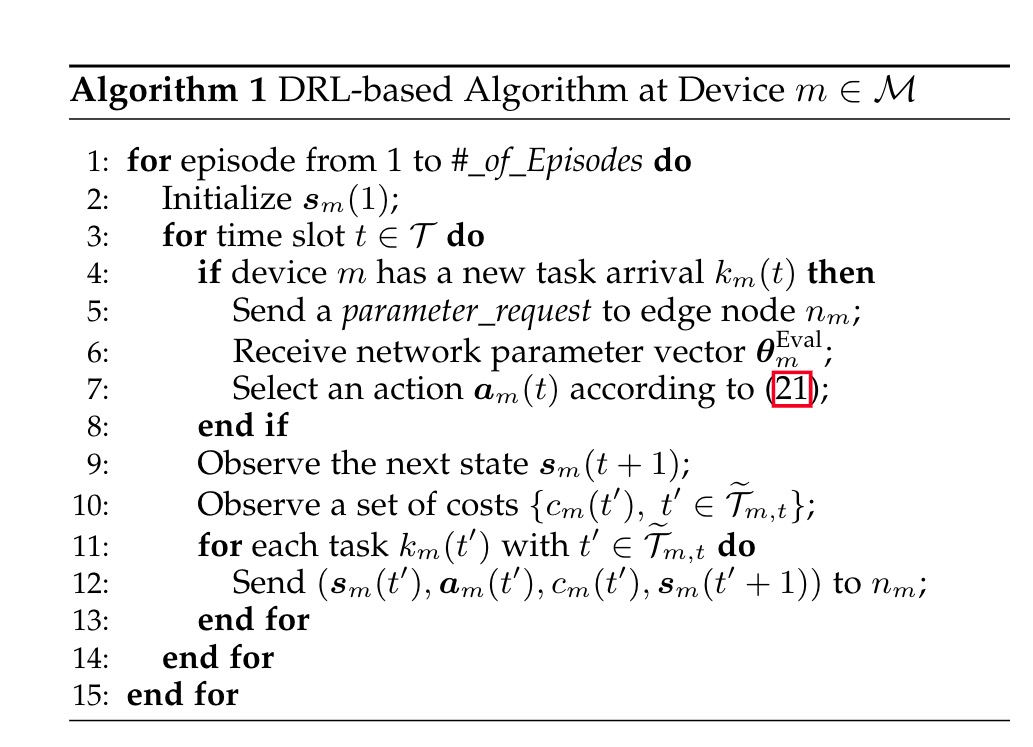
如图所示,在m上:
- 初始化$s_m(1)$,例如:$s_m(1) = (\lambda_m(1), \delta_m^{comp}(1),\delta_m^{tran}(1),q_m^{edge}(0),H(1))$
其中$q_{m,n}^{edge}(0)=0$对于所有$n \in \mathcal{N}$,$H(1)$是一个数值全为0的矩阵。
- 当有$k_m(t)$到达时,发送一个请求参数 (parame-terrequest) 给边缘节点$n_m$。
- 收到边缘节点$n_m$的Eval_Net返回的参数$\theta_m^{Eval}$。
- 设备m选择$k_m(t)$接下来的action:
其中$\epsilon$是一个概率常数,为greedy(epsilon)。
- 由于任务的处理和传输可能持续多个时隙,所以在时隙t+1可能观察不到任务$k_m(t)$的延迟(成本)$c_m(t)$。相对的,可以观察一组任务$k_m(t)^{‘}$的成本,$t^{‘} ≤ t$。我们定义$\tilde{\mathcal{T}}_{m,t} \subset \mathcal{T} $为一组时隙,使得每个$k_m(t^{‘})$都在时隙中被处理。$\tilde{\mathcal{T}}_{m,t}$定义如下:
具体的说,如果任务$k_m(t^{‘})$已经在时隙t中被处理,则$t^{‘}$被集合$\tilde{\mathcal{T}}_{m,t}$包含。因此在时隙t+1的开始,移动设备可观察到一组成本$\{c_m(t^{‘}) , t^{‘} \in \tilde{\mathcal{T}}_{m,t}\}$,其中$\tilde{\mathcal{T}}_{m,t}$可以是某些m和t的空集。然后对于每个$k_m(t^{‘})$,设备m发送他们的transition$(s_m(t^{‘}),a_m(t^{‘}),c_m(t^{‘}),s_m(t^{‘}+1))$到边缘节点$n_m$上。
在边缘节点n上的算法
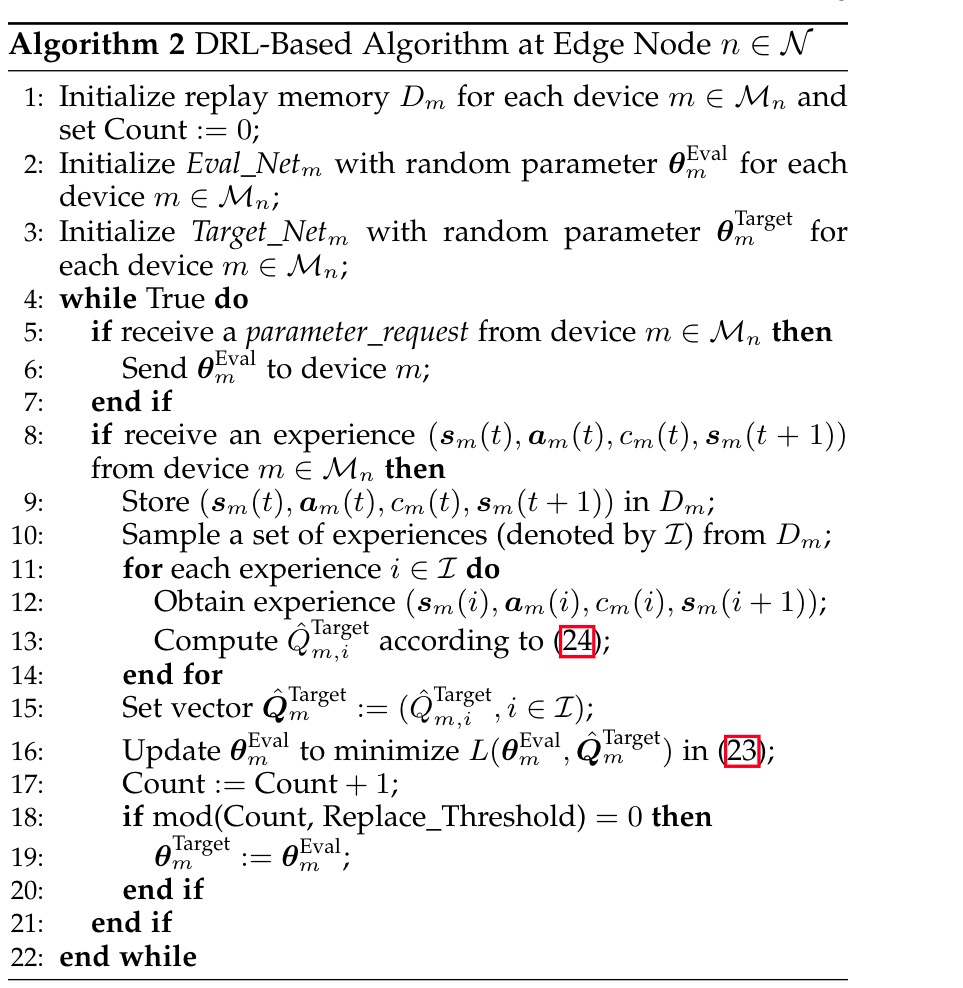
- 初始化$D_m$,Eval_net 和 Target_Net 。
等待m发送信息:
- 如果接收的是一个请求参数 (parameterrequest) 则发送当前 Eval_net 的参数$\theta_m^{Eval}$给m。
如果接收到的是一条transition$(s_m(t),a_m(t),c_m(t),s_m(t+1))$:
- 将他放入到$D_m$中,如果$D_m$已满,则采用FIFO方法管理。
边缘节点将会用这些transition来训练神经网络(大概10-20步,详见算法),用于更新Eval_net 的参数$\theta_m^{Eval}$。(使用Double-DQN方法)
计算TD Target:从中随机抽样$\mathcal{I}$条transition来计算$\hat{Q}_m^{Target}$:
$\hat{Q}_{m, i}^{\text {Target }}=c_{m}(i)+\gamma Q_{m}^{\text {Target }}\left(\boldsymbol{s}_{m}(i+1), \boldsymbol{a}_{i}^{\text {Next }} ; \boldsymbol{\theta}_{m}^{\text {Target }}\right)$
其中$a_i^{Next}$由Eval_Net的状态$s_m(t+1)$下的最小Q值动作给出:计算TD error:使用最小化损失函数计算:
每过一定步骤,更新网络参数:$\theta_m^{Target} = \theta_m^{Eval}$。