[强化学习]策略学习
定义
使用一个策略网络$π(a|s;\theta)$来控制Agent。策略函数π的输入是状态s和动作a,θ 表示神经网络的参数,输出是一个0到1之间的概率值。
每当观测到一个状态s,就用策略函数计算出每个动作的概率值,然后做随机抽样,得到一个动作a,让智能体执行a。
一开始随机初始化θ,随后利用收集的状态、动作、奖励去更新θ。
- 状态价值函数:
Policy Gradient
- 策略梯度函数就是$V_π$对θ的求导:
其中$\nabla f(x) = f(x)\nabla logf(x)$
即:
又有
$\begin{aligned}
E_{A \sim \pi}[\nabla \ln \pi(A \mid s ; \theta )\cdot Q \pi(s, a)]\approx \frac{1}{N} \sum_{n=1}^{N} \nabla \ln _{\pi}(A \mid s ; \theta) Q \pi\left(s, a\right) \\
=\frac{1}{N} \sum_{n=1}^{N} \sum_{n=1}^ \nabla \ln \pi\left(q_{t}^{n} \mid s_{t}^{n} ; \theta\right) Q \pi\left(s_t, a_t\right)\\
\end{aligned}$
看后面$ \sum_{n=1}^ \nabla \ln \pi\left(q_{t}^{n} \mid s_{t}^{n} ; \theta\right) Q \pi\left(s^{n}, a^{n}\right)$ ,我们可以理解为对于一个序列,求出每一次action在该state下的对数条件改了分布梯度并求和,然后乘以一个权重,这个权重就是该序列的奖励(Q值)。
简单的说就是如果最终奖励是正的,那么就增加这个序列出现的概率;反之如果是负的,就减少它出现的概率。
Baseline
我们为什么需要一个Baseline
我们知道,因为序列的可能性无穷多,所以我们会多次采样来估计这个概率分布,然后根据Reward的大小来调整买个序列出现的概率。
但这样就会导致: 有一部分序列一直没被采样到,然而其他序列的Reward又一直是正的,导致其他序列的出现概率在疯狂增加,相应地这个序列出现的概率就会被挤占,最终导致明明这个序列的 Reward 很高,但是因为采样的问题被忽略掉了。
举个例子:如果一个人说“追女生被拒了我就血亏,而且反正我觉得我也追不到女生。相比而言,如果干脆就不追,我还能打游戏——不谈小赚,至少肯定不亏,我还很开心,是吧。”那么他可能就永远不会去追女生,但是他忽略掉了如果他追到女生的奖励会是非常大的,这也就是Policy Gradient的问题。
为了解决这个问题,所以我们添加一个 Baseline ,让一部分reward变成负的,在遇到负reward的时候,他就会减小这个序列出现的概率,这样就会把机会“让”给别的序列了。
从数学上来说就是减去一个值b,让奖励更均衡。
Baseline是一个函数 b,他可以是任何函数,但他不能依赖动作 A。
策略梯度又有:
定义一:如果b与动作$A_t$无关,那么策略梯度就有:
蒙特卡洛近似
我们设$g(A_t) = \left[\frac{\partial \ln \pi(A \mid s ; \boldsymbol{\theta})}{\partial \boldsymbol{\theta}}\left(Q_{\pi}(s, A)-b\right)\right]$,他依赖于随机变量$A_t$。我们对策略π做随机抽样,得到一个$a_t \sim π(·|s_t;θ)$并且计算$g(a_t)$。那么$g(a_t)$就是$g(A_t)$的 蒙特卡洛近似。训练策略网络的时候都是用$g(a_t)$。
- 训练的时候使用随机梯度上升来训练:
$θ \gets θ + \beta · g(a_t)$ - b虽然不影响策略梯度函数$\mathbb{E}_{A \sim \pi}[g(A_t)]$,但他影响$g(a_t)$。
- 一个好的b可以让方差更小并让算法收敛得更快。
- choice 1:b = 0。即不使用Baseline。
- choice 2:b 是状态价值函数$V_π$。
REINFORCE with Baseline
- 折扣回报: $U_t$ = $R_t + \gamma · R_{t+1} + \gamma ^ 2 · R_{t+2} + … \gamma ^{n - t} · R_n$
- 动作价值函数: $Q_π(s_t, a_t) = \mathbb{E}[U_t|s_t,a_t]$
- 状态价值函数: $V_π(s_T) = \mathbb{E}[Q_π(s_T,A)|s_t ]$
- 这里使用状态价值函数当作Baseline,即$b = V_π(s_t)$。那么就有了随机策略梯度:$g(a_t) = \left[\frac{\partial \ln \pi(a_t \mid s_t ; \boldsymbol{\theta})}{\partial \boldsymbol{\theta}}\left(Q_{\pi}(s_t, A_t)- V_π(s_t)\right)\right]$.这个式子用$Q_π$和$V_π$两个未知数,我们需要对这两个未知数做蒙特卡洛近似:
- 蒙特卡洛近似:$Q_π(s_t,a_t) \approx u_t$: (REINFORCE)
- 观察一条轨迹:$s_t,a_t,r_t,s_{t+1},a_{t+1},r_{t+1},…,s_n,a_n,r_n.$
- t时刻开始所有的奖励做加权求和,得到retuen: $u_t = \sum_{i=1}^n \gamma^{i-t} · r_i$.
- $u_t$是一个关于$Q_π(s_t,a_t)$无偏估计。
- $V_π$用神经网络做近似,得到$v(s;w)$,称为价值网络。
- 蒙特卡洛近似:$Q_π(s_t,a_t) \approx u_t$: (REINFORCE)
- 最后可以得到:
一共做了三次近似:
- 使用一个样本 $a_t$ 来近似期望。(蒙特卡洛近似)
- 使用 $u_t$ 来近似 $Q_π(s_t,a_t)$ 。(蒙特卡洛近似)
- 使用价值网络 $v(s;w)$ 来近似 $V_t(s)$ 。
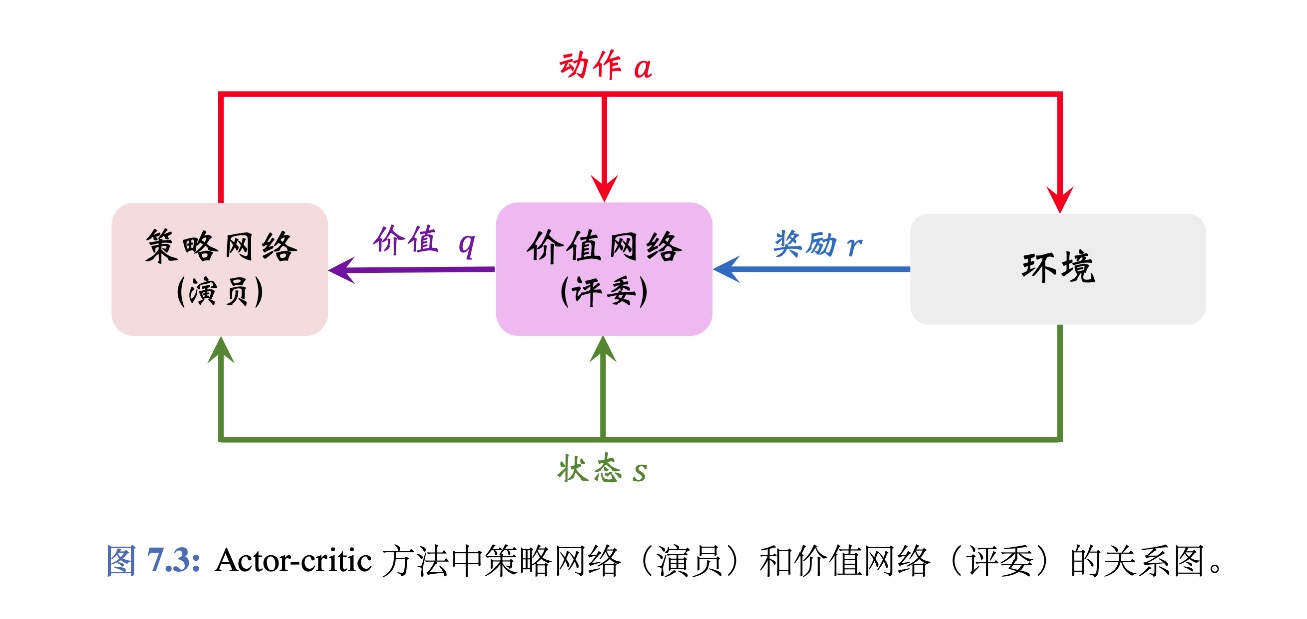
Policy and Value Network
我们需要两个网络:一个策略网络和一个价值网络。策略网络用来控制Agent,价值网络起辅助作用,作为Baseline,帮助训练策略网络。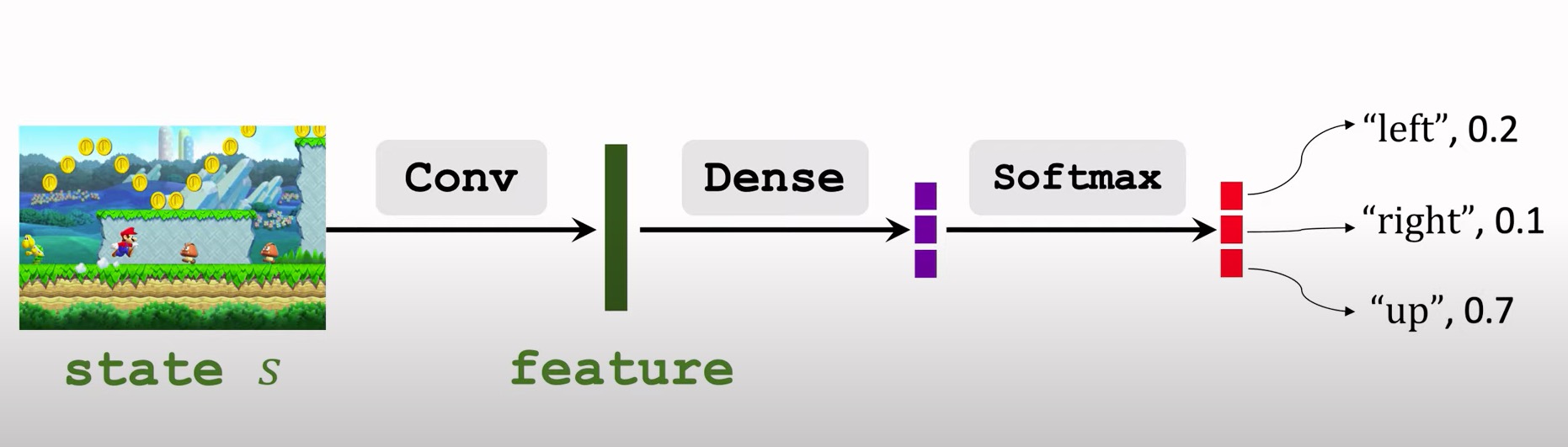
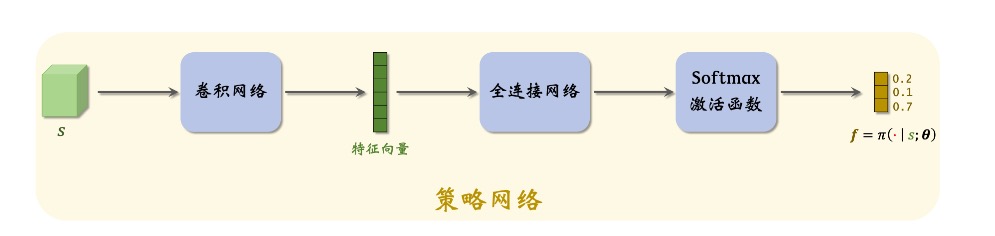
策略网络 π(a|s;θ) 的神经网络结构。输入是状态s,输出是动作空间中每个动作的概率值。举个例子,动作空间是A = {左,右,上},策略网络的输出是三个概率值:π(左|s;θ) = 0.2,π(右|s;θ) = 0.1,π(上|s;θ) = 0.7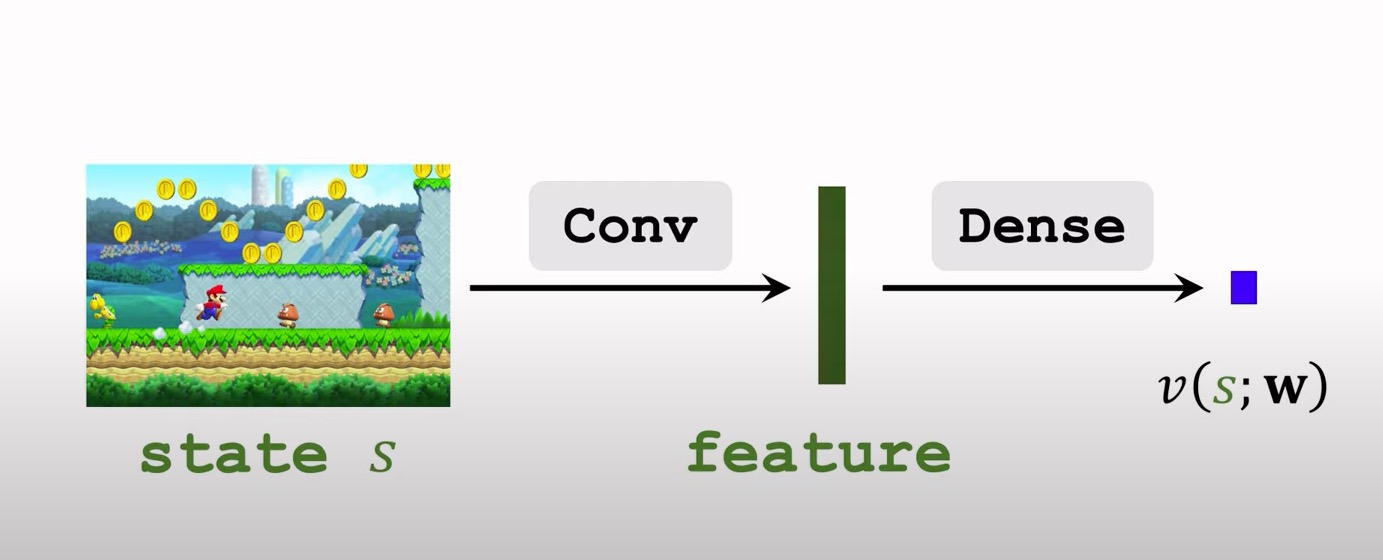
价值网络被用作Baseline。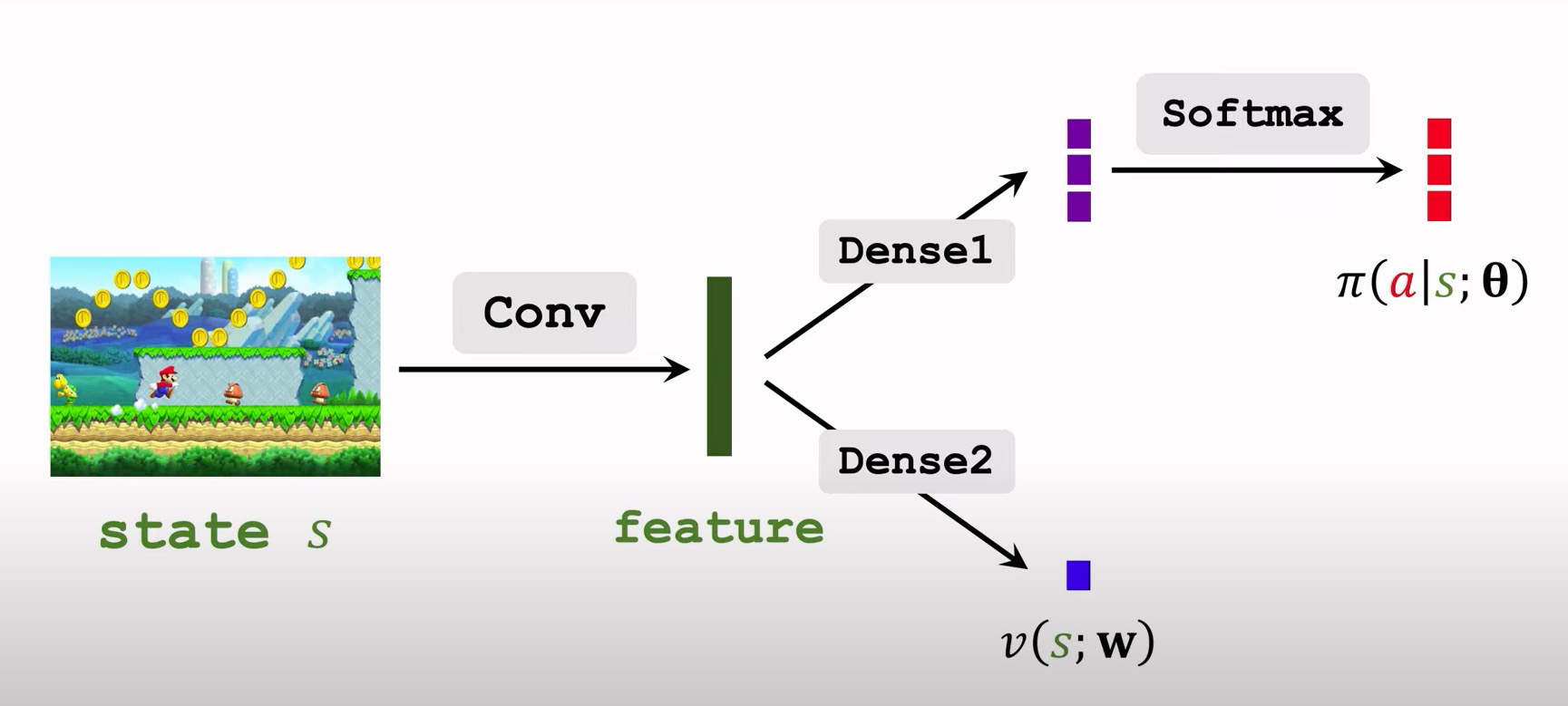
两个神经网络输入相同,都是用卷积层提取特征,所以可以共享卷积层。
使用REINFORCE来训练策略网络
- 使用梯度上升来更新策略梯度: 记$(u_{t}-v\left(s_{t} ; \mathbf{w}\right))$为 $-\delta_t$ 那么就有:
使用回归方法训练价值网络
- 预测误差:$\delta_t = v(s_t,w)-u_t$.
- 把$\delta_t^2$作为loss函数,求梯度: $\frac{\partial \delta_{t}^{2} / 2}{\partial \mathbf{w}}=\delta_{t} \cdot \frac{\partial v\left(s_{t} ; \mathbf{w}\right)}{\partial \mathbf{w}}$
- 梯度下降:
算法总结:
1.用策略网络$θ_{now}$控制智能体从头开始玩一局游戏,得到一条轨迹(trajectory):
$s_1,a_1,r_1, s_2,a_2,r_2,…, s_n,a_n,r_n$
2.计算所有的回报:$u_t = \sum_{i=1}^n \gamma^{i-t} · r_i$.
3.让价值网络做预测:$\hat{u_t} = v(s_t;w)$
4.计算误差:$\delta_t = \hat{u_t} - u_t$
5.更新策略网络:
Advantage Actor-Critic(A2C)
同REINFORCE with Baseline 一样,有两个神经网络:
- 策略网络(actoe):$π(a|s;θ)$:用一个$π(a|s)$来近似,用来控制Agent。
- 价值网络(critic):$v(s;w)$:用一个状态价值函数$V_π(s)$来近似,用来评价状态s的好坏。他只依赖于状态s。
A2C的训练过程:
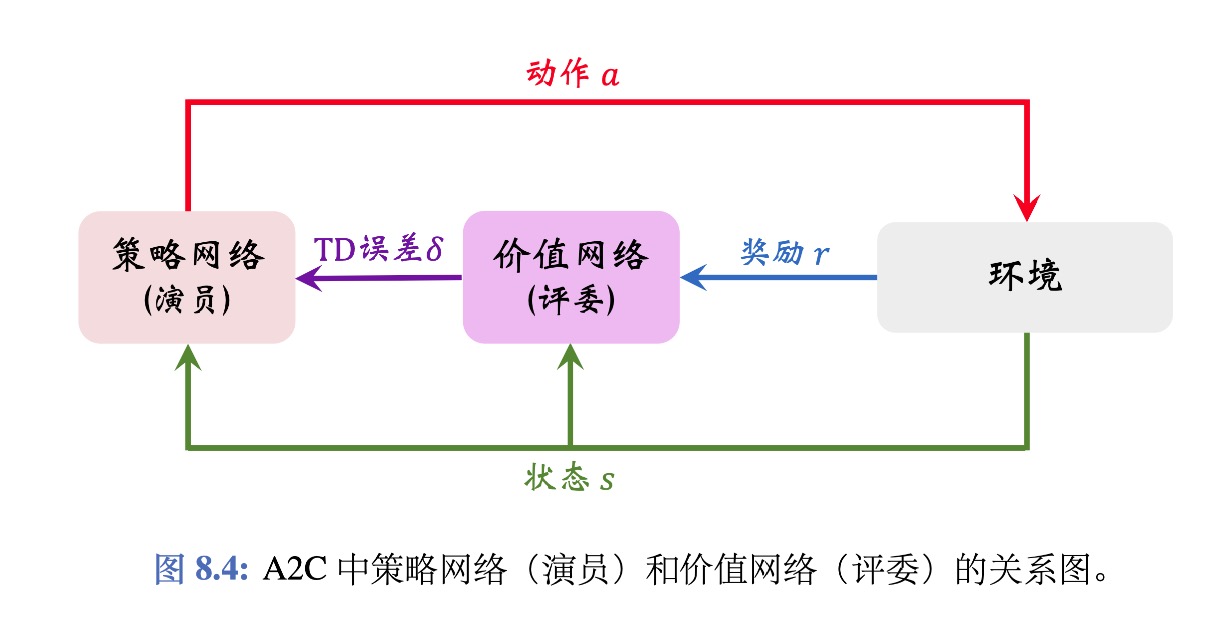
- 观测到一个transition$(s_t,a_t,r_t,s_{t+1}).$
- TD target: $y_t = r_t + \gamma \cdot v(s_{t+1};w)$.
- TD error: $\delta_t = v(s_t;w) - y_t$
更新策略网络(actor):
更新价值网络(critic):
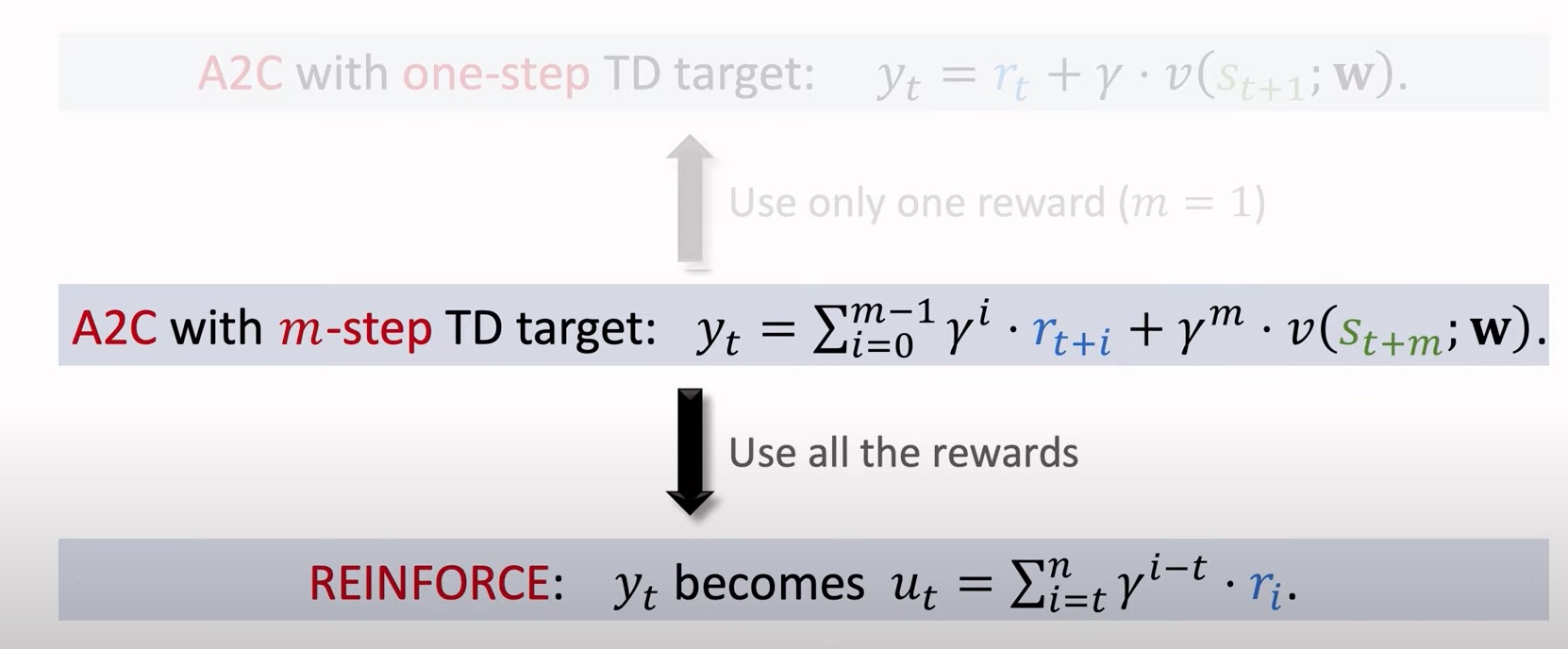
One-Step VS Multi-Step Target
- One-Step
- 一个transition$(s_t,a_t,r_t,s_{t+1})$.
- One-Step TD target:$y_t = r_t + \gamma \cdot v(s_{t+1};w)$.
- Muti-Step
- 观测m个transition:${(s_{t+i},a_{t+i},r_{t+i},s_{t+i+1})}_{i=0}^{m=-1}$
m-step TD target:
- 观测m个transition:${(s_{t+i},a_{t+i},r_{t+i},s_{t+i+1})}_{i=0}^{m=-1}$
Multi-Step 算法过程
- 观测到一个从t到t+m-1的轨迹
- TD target: $y_{t}=\sum_{i=0}^{m-1} \gamma^{i} \cdot r_{t+i}+\gamma^{m} \cdot v\left(s_{t+m} ; \mathbf{w}\right)$.
- TD error: $\delta_t = v(s_t;w) - y_t$
更新策略网络(actor):
更新价值网络(critic):
区别仅仅为更换了TD target,其他地方没有区别。
REINFORCE with Baseline与A2C的区别
用的网络完全一样,只是价值网络的功能有所区别。
- A2C的价值网络为critic,用来评价Agent的表现。
- REINFORCE with Baseline的价值网络用来当作Baseline,不会评价动作的好坏,唯一用途就是降低随机梯度造成的方差。
联系:
A2C与AC的区别